Overview
This project was developed between 2020 and 2022 to build a remote water quality monitoring prototype for fish farmers in Huila, Colombia.
Note that for a more detailed discussion, the published research article can be consulted (it is open access): Open-source low-cost design of a buoy for remote water quality monitoring in fish farming
Problem
The problem we set out to work on was to provide data to fish farmers to improve decision-making. At the time, small and medium fish farmers in Colombia had very little data to base their decisions on. Commercially available devices they used consisted of probes that were manually placed by a worker at the lake where they wanted to measure. This introduced a variety of problems, for example:
- Water quality variables, such as dissolved oxygen, vary during the day. Manually checking at different times can miss identifying dangerous levels that only occur during a certain period.
- It can be complicated to test at different locations across all lakes frequently.
- Probes were quite expensive and could be damaged by the workers at the farm. This meant that the farm could be left with few or no devices at all for measurement.
Development
The first part of the project was to identify which water quality variables needed to be measured. The following 3 variables were decided:
- Temperature
- Dissolved Oxygen
- pH
Of these 3, dissolved oxygen would be the most critical, and will be the main focus going forward. This is because dissolved oxygen (measured in mg/L) needs to be above a minimum threshold to maintain healthy conditions for the fish. When it is too low, aerators are used to increase it. However, since there is very little water quality data available, only coming from sporadic measurements done manually by probes, fish farmers have almost no idea about when to turn on or off the aerators. This causes 2 important consequences:
- Aerators were turned on, but dissolved oxygen wasn’t in dangerous levels. This increased the energy costs of the farm.
- Aerators were not turned on when they needed to be, because dissolved oxygen was low enough. This could impact the farm production by affecting the fish size, or even leading to dead fish.
Other issues encountered at the farms are little access to connectivity and electricity. There may not be a reliable connection for transmitting data or powering the device at the installation site. For this, it was decided that the prototype had to be low-power to be powered by batteries, and it would use LoRaWAN for transmitting data to a central point at the farm. Therefore, the prototype had to implement the following:
- Battery-powered
- Data transmission using LoRaWAN
- Measure water temperature, dissolved oxygen and pH
In addition, it was also decided that the device would be a floating buoy placed at the artificial lakes. This way, no additional installation (poles, etc) would be required for the device. The buoy would simply be placed at the desired location and it would be kept fixed using an anchor.
Results
I was in charge of the software and hardware development of the buoy. This included the following tasks:
- Component selection (voltage regulator, sensor probes, microcontroller, etc)
- Circuit design and prototyping
- PCB layout and routing
- Electronics and final assembly with the entire buoy system
The following image shows a simplified view of the buoy:
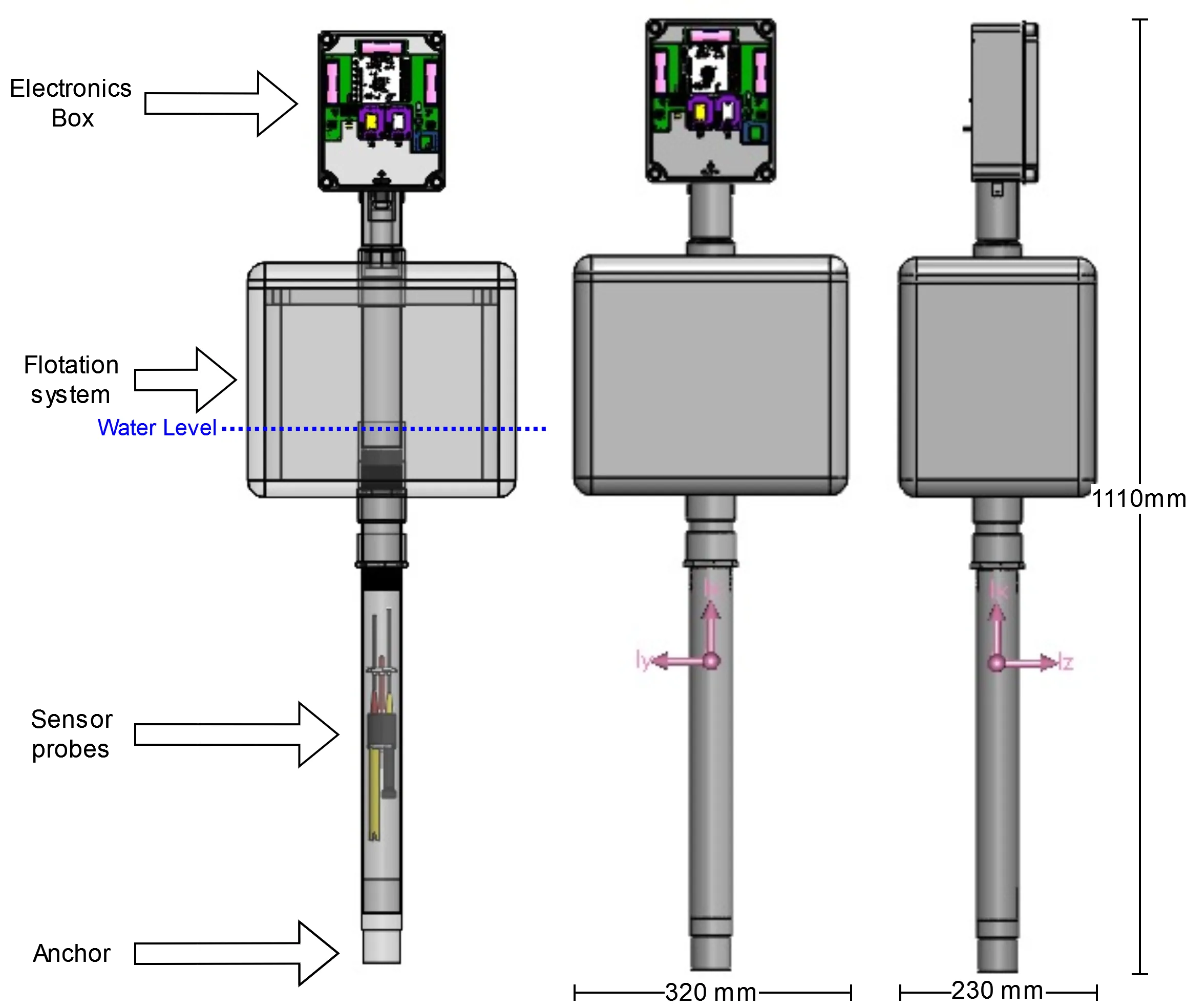
-
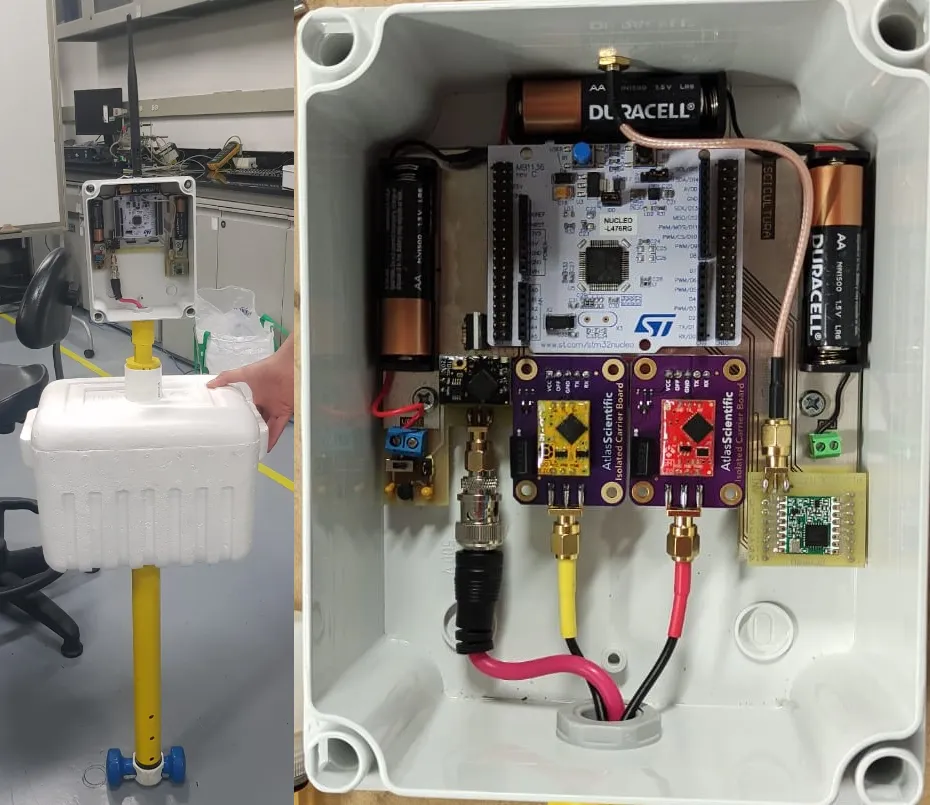
Sensor probes from Atlas Scientific were selected due to their lower cost, and longer maintenance and calibration periods while still providing quality measurements.
-
The microcontroller used was the low-power NUCLEO-L476RG board and it was programmed entirely in C using a bare-metal approach through the STM32CubeIDE.
-
An RFM95W transceiver was used alongside a port of the MCCI LoRaWAN LMIC Library for the selected microcontroller to transmit messages to a prototype LoRaWAN gateway.
-
In order to power the device for long periods of time using locally-sourced batteries, the device was programmed to enter a low-power mode during measurements. A low quiescent current regulator was selected to minimize the power consumption during low periods.
The developed device was tested in real-world conditions at an operating fish farm close to Neiva, Huila. This process involved visiting the farm and installing the prototype at one of the lakes selected with the administrator. Shown below is a picture of the device in operation at the lake.

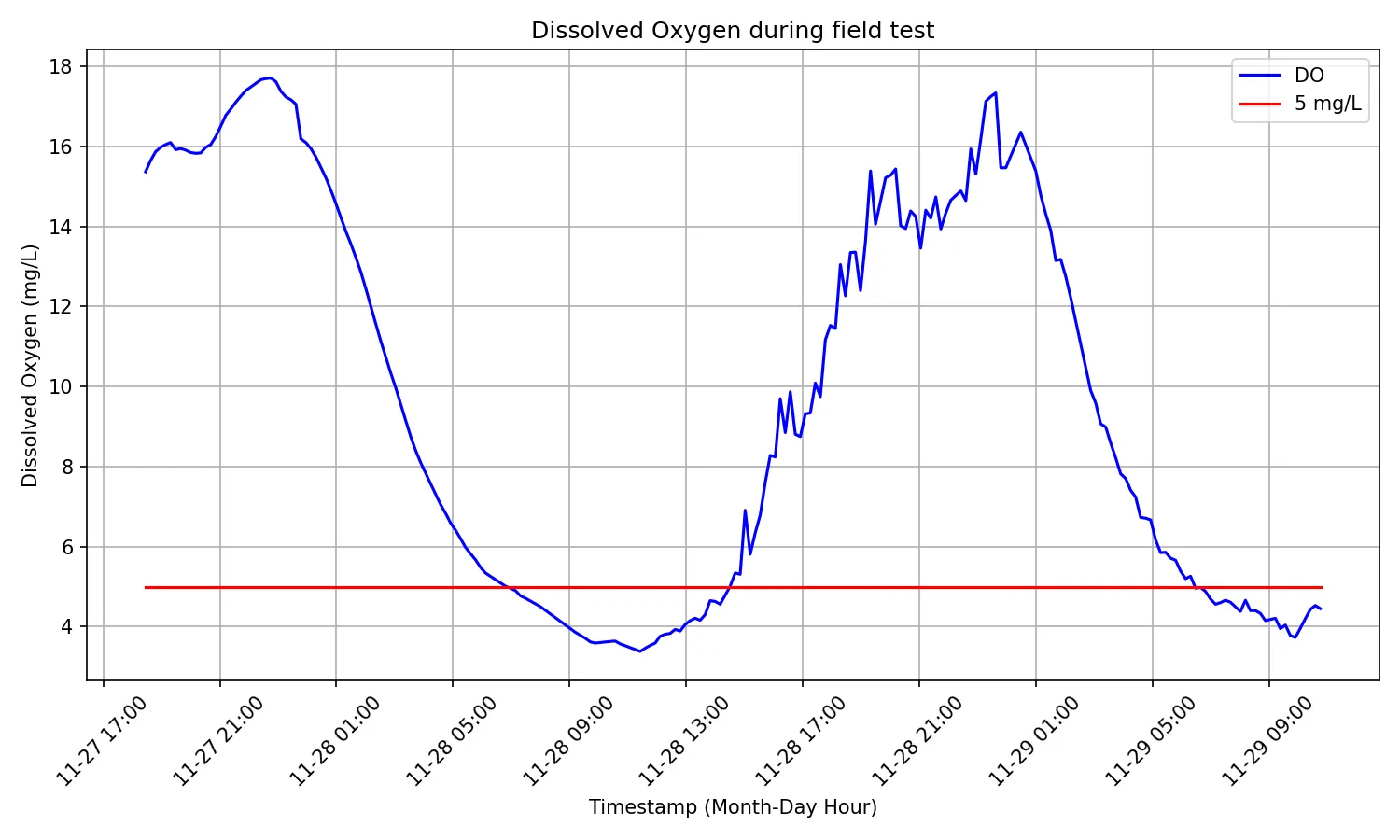
Data was gathered for a few days. Below, two days worth of data taken every 10 minutes can be observed for dissolved oxygen. Here, one can see the potential of the solution. Taking a minimum threshold of 5 mg/L, recorded dissolved oxygen values reached values close to 3 mg/L which can negatively affect fish or even lead to death.
Lessons learned
- I learned a lot about product design. In this case, the interest was to build a device that could be useful to fish farmers, while also proving financially viable.
- There were difficulties at the time due to the COVID pandemic. For this reason, I had to work mostly with locally sourced components.